
- Sunrise Electric Motor Company
Quality Guarantee
 Home > News
Home > News
Stepper motor is a discrete motion device, it and modern digital control technology has an essential link. In the current domestic digital control system, the application of stepper motor is very extensive. With the advent of all-digital AC servo systems, AC servo motors are also increasingly being used in digital control systems. In order to meet the development trend of digital control, most of the motion control system using stepper motor or all-digital AC servo motor as the implementation of the motor. Although both are similar in control mode (burst and direction signals), there are significant differences in performance and application. Now compare the performance of the two.
Control accuracy is different
Two-phase hybrid stepper motor step angle is generally 3.6 degrees, 1.8 degrees, five-phase hybrid stepper motor step angle is generally 0.72 degrees, 0.36 degrees. There are also some high-performance stepper motors with smaller step angles. Such as the company's production of a stepping motor for walking wire machine, the step angle of 0.09 degrees; Germany 100 lattice company (BERGERLAHR) production of three-phase hybrid stepper motor its step angle can be allocated by dial The code switch is set to 1.8 degrees, 0.9 degrees, 0.72 degrees, 0.36 degrees, 0.18 degrees, 0.09 degrees, 0.072 degrees, 0.036 degrees, compatible with two-phase and five-phase hybrid stepper motor step angle.
The accuracy of the AC servo motor is guaranteed by the rotary encoder at the rear of the motor shaft. To Panasonic all-digital AC servo motor, for example, with a standard 2500-wire encoder motor, the driver used within the quadruple frequency technology, the pulse equivalent of 360 degrees / 10000 / 0.3036 degrees. For motors with 17-bit encoders, the driver receives 217 = 131072 pulse motors for one revolution, that is, the pulse equivalent of 360 degrees / 131072 = 9.89 seconds. Is 1/655 of the pulse equivalent of the step motor with a step angle of 1.8 degrees.
Low frequency characteristics are different
Stepper motor at low speed prone to low frequency vibration phenomenon. The vibration frequency is related to the load condition and the drive performance. It is generally believed that the vibration frequency is half of the motor no-load take-off frequency. This low-frequency vibration phenomenon, which is determined by the working principle of the stepper motor, is very unfavorable to the normal operation of the machine. When the stepper motor is operating at low speed, damping technology should generally be used to overcome the low frequency vibration phenomenon, such as in the motor plus damper, or drive on the use of sub-technology.
AC servo motor running very smoothly, even at low speed will not appear when the vibration phenomenon. AC servo system with resonance suppression function, can cover the lack of mechanical rigidity, and the system has a frequency resolution function (FFT), can detect the mechanical resonance point, easy to adjust the system.
Moment frequency characteristics are different
The output torque of the stepper motor decreases as the speed increases and decreases drastically at higher speeds, so the maximum operating speed is typically between 300 and 600 RPM. AC servo motor for constant torque output, that is, its rated speed (usually 2000RPM or 3000RPM) within, can output the rated torque, above the rated speed for the constant power output.
Overload capacity is different
Stepper motors generally do not have overload capacity. AC servo motor has a strong overload capacity. To Panasonic AC servo system, for example, it has a speed overload and torque overload capacity. The maximum torque is three times the rated torque and can be used to overcome the moment of inertia of the inertia load at the moment of activation. Stepping motor because there is no such overload capacity, in order to overcome this inertia moment in the selection, often need to select a larger torque of the motor, and the machine during normal work without the need for such a large torque, there is a moment The phenomenon of waste.
Running performance is different
Stepper motor control for the open-loop control, the starting frequency is too high or the load is too large prone to stealing or stall phenomenon, stop the high speed is prone to overshoot phenomenon, so to ensure its control accuracy, should be handled L, slow down the problem.
AC servo drive system for the closed-loop control, the driver can be directly on the motor encoder feedback signal sampling, the internal configuration of the location ring and speed loop, generally do not appear stepping motor stepping or overshoot phenomenon, control performance is more reliable.
Speed response performance is different
Stepping motor from the static acceleration to the working speed (usually hundreds of turns per minute) need 200 to 400 milliseconds. AC servo system to accelerate the performance of better, to Panasonic MSMA400W AC servo motor, for example, from the static acceleration to its rated speed 3000RPM only a few milliseconds, can be used for fast start and stop control occasions.
In summary, the AC servo system is superior to stepper motors in many performance areas. But in some less demanding occasions often use stepper motor to do the implementation of the motor. Therefore, in the control system design process to consider the control requirements, cost and other factors, choose the appropriate control of the motor.
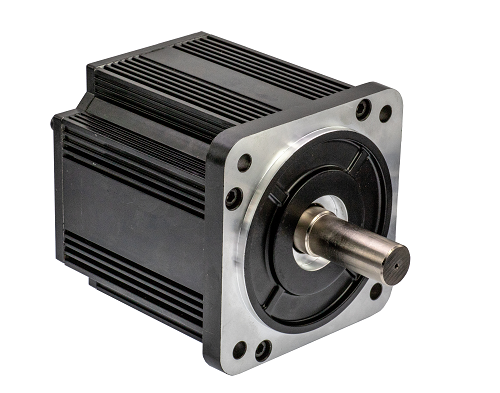
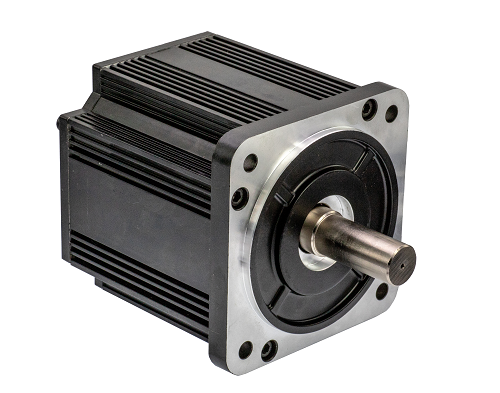
A stepper motor is an actuator that converts electrical pulses into angular displacements. It is popular to say that when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle (and step angle) in the set direction.
You can control the number of pulses to control the angular displacement, so as to achieve the purpose of accurate positioning; At the same time you can control the pulse frequency to control the motor speed and acceleration, so as to achieve the purpose of speed.
Stepper motor is divided into three kinds: permanent magnet (PM), reactive (VR) and hybrid (HB)
Permanent magnet step is generally two-phase, torque and volume is small, the step angle is generally 7.5 degrees or 15 degrees;
Reaction step is generally three-phase, can achieve large torque output, step angle is generally 1.5 degrees, but the noise and vibration are great. In Europe and the United States and other developed countries have been eliminated 80 years;
The mixed step is the advantage of mixing the permanent magnetism and the reaction type. It is divided into two-phase and five-phase: two-step steep angle is generally 1.8 degrees and five-step steep angle is generally 0.72 degrees. This stepper motor is the most widely used.




 0086-519-88298833
0086-519-88298833




View More(Total0)Comment Lists